任务优先级说明下面对 FreeRTOS 优先级相关的几个重要知识点进行下说明,这些知识点在以后的使用中务必要掌握牢固。 FreeRTOS 中任务的最高优先级是通过 FreeRTOSConfig.h 文件中的 configMAX_PRIORITIES 进行配置的,用户实际可以使用的优先级范围是 0 到 configMAX_PRIORITIES – 1。比如我们配置此宏定义为 5,那么用户可以使用的优先级号是 0,1,2,3,4,不包含 5,对于这一点,初学者要特别的注意。 用户配置任务的优先级数值越小,那么此任务的优先级越低,空闲任务的优先级是 0。 建议用户配置宏定义 configMAX_PRIORITIES 的最大值不要超过 32,即用户任务可以使用的优先级范围是0到31。因为对于CM内核的移植文件,用户任务的优先级不是大于等于32的话, portmacro.h文件中的宏定义configUSE_PORT_OPTIMISED_TASK_SELECTION会优化优先级列表中要执行的最高优先级任务的获取算法(对于 CM 内核的移植文件,此宏定义默认是使能的,当然,用户也可以在FreeRTOSConfig.h 文件中进行配置)。 相比通用的最高优先级任务获取算法,这两种方式的对比如下: 通用方式,没有优化---配置宏定义 configUSE_PORT_OPTIMISED_TASK_SELECTION 为 0: 所有平台的移植文件都可以配置为 0,因为这是通用方式。 纯 C 编写,比专用方式效率低。 可用的优先级数量不限制。 专用方式,进行优化---配置宏定义 configUSE_PORT_OPTIMISED_TASK_SELECTION 为为 1: 部分平台支持。 这些平台架构有专用的汇编指令,比如 CLZ(Count Leading Zeros)指令,通过这些指令可以加速算法执行速度。 比通用方式高效。 有最大优先级数限制,通常限制为 32 个。
如果用户在 FreeRTOSConfig.h 文件中配置宏定义 configUSE_TIME_SLICING 为 1,或者没有配置
此宏定义,时间片调度都是使能的。 另外,只要芯片资源允许,可以配置任意多个同优先级任务。(备注:没有定义 configUSE_TIME_SLICING,也能使用时间片调度是因为此宏定义默认已经在FreeRTOS.h 文件中使能) FreeRTOS 中处于运行状态的任务永远是当前能够运行的最高优先级任务。 下一章节讲解调度器,大家会对这个知识点有一个全面的认识。
任务优先级分配方案对于初学者,有时候会纠结任务优先级设置为多少合适,因为任务优先级设置多少是没有标准的。对于这个问题,我们这里为大家推荐一个标准,任务优先级设置推荐方式如下图 13.1 所示:
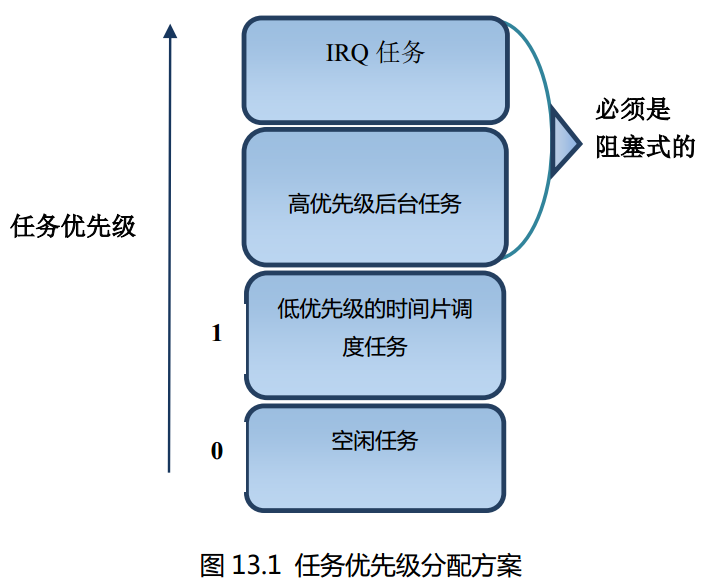
IRQ 任务:IRQ 任务是指通过中断服务程序进行触发的任务,此类任务应该设置为所有任务里面优先级最高的。 高优先级后台任务:比如按键检测,触摸检测,USB 消息处理,串口消息处理等,都可以归为这一类任务。 低优先级的时间片调度任务:比如 emWin 的界面显示,LED 数码管的显示等不需要实时执行的都可以归为这一类任务。 实际应用中用户不必拘泥于将这些任务都设置为优先级 1 的同优先级任务,可以设置多个优先级,只需注意这类任务不需要高实时性。 空闲任务:空闲任务是系统任务。 特别注意:IRQ 任务和高优先级任务必须设置为阻塞式(调用消息等待或者延迟等函数即可),只有这样,高优先级任务才会释放 CPU 的使用权,,从而低优先级任务才有机会得到执行。这里的优先级分配方案是我们推荐的一种方式,实际项目也可以不采用这种方法。 调试出适合项目需求的才是最好的。
中断优先级和任务优先级区别部分初学者也容易在这两个概念上面出现问题。 简单的说,这两个之间没有任何关系,不管中断的优先级是多少,中断的优先级永远高于任何任务的优先级,即任务在执行的过程中,中断来了就开始执行中断服务程序。另外对于 STM32F103,F407 和 F429 来说,中断优先级的数值越小,优先级越高。 而 FreeRTOS的任务优先级是,任务优先级数值越小,任务优先级越低。